
PIAP GRYF®
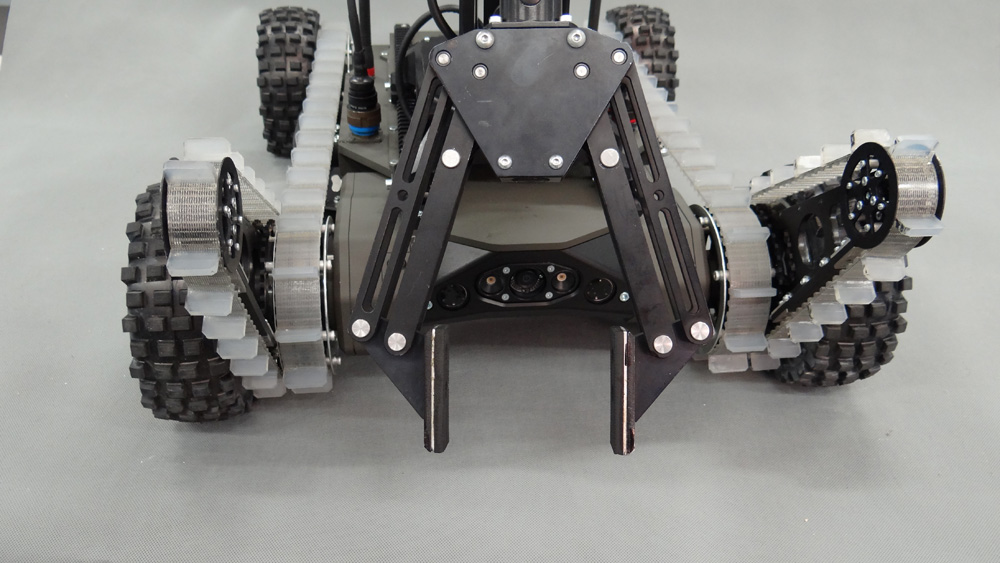
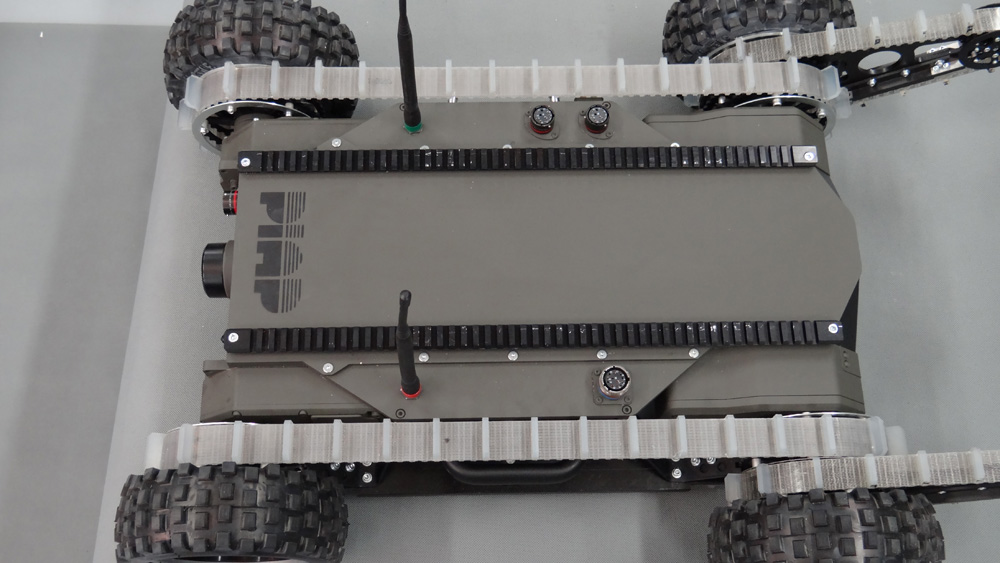
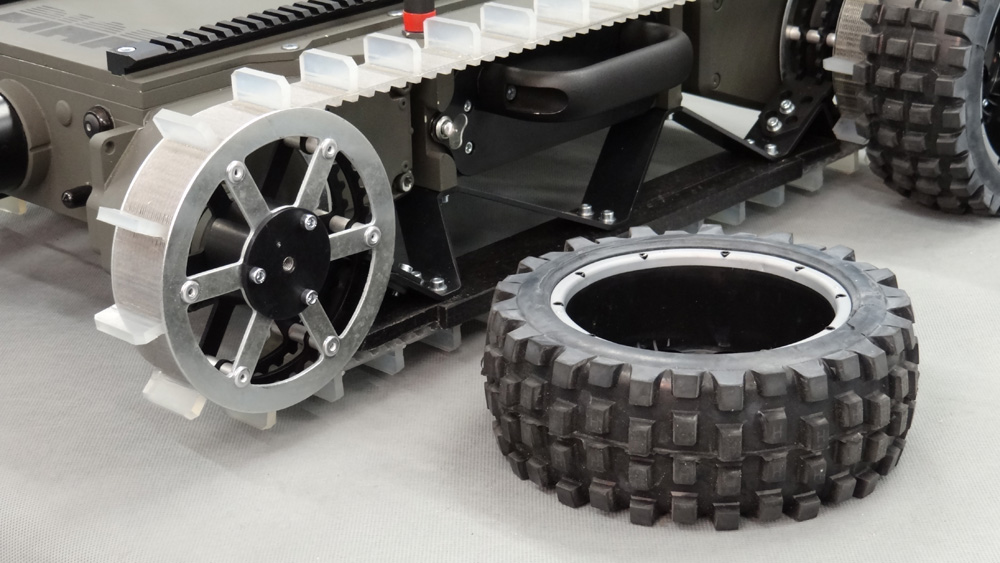
PIAP GRYF® to mobilny robot EOD pirotechniczny wykorzystywany do rozpoznania terenu i miejsc trudnodostępnych. Koła robota mogą być łatwo zdemontowane, co zmniejsza gabaryty robota, a tym samym ułatwia prowadzenie akcji w wąskich przestrzeniach.
Dzięki zastosowanym napędom robot EOD PIAP GRYF sprawnie pokonuje nierówności terenu i przeszkody o kącie nachylenia do 45°. Cechą szczególną robota jest doskonała manewrowość. Niewielka masa ułatwia transport i przenoszenie robota, a jego modułowa konstrukcja pozwala na szybką i łatwą zmianę dodatkowego oprzyrządowania.
Ulotka PIAP GRYF®
Dane techniczne
( wszystkie wagi i wymiary są przybliżone i mogą ulec zmianie bez powiadomienia )
Wymiary (przy złożonym ramieniu)
95 x 60 x 55 cm (dł./sz./wys.)
Długość robota + przednie gąsienice
95 cm
Masa całkowita
47 kg
Prędkość
do 6,5 km/h; 8km/h* na zamówienie
Udźwig
do 15 kg
Zasięg manipulatora
2,2 m
Liczba stopni swobody
5 + zacisk szczęk chwytaka, dodatkowo manualnie wysuwane ramię teleskopowe
Liczba kamer
4
Czas pracy robota przy zasilaniu z akumulatorów
ok. 2 h
Układ napędowy
kołowo-gąsiennicowy
Akcesoria

- Wyposażenie:
– kamera z oświetlaczami IR do użytku w dzień i w nocy
– lasery (2szt)
– włącznik bezpieczeństwa
- waga [kg]: 2,1
- wymiary [cm]: 12-20 (szer) x14 (wys) x 11(dł)

- umożliwia zamontowanie strzelby typu Benelli M4 Super 90
- wyposażony w celownik laserowy, złącze akcesoriów i włącznik bezpieczeństwa
- materiały: stal + aluminium
- waga [ kg]: 3
- wymiary [cm]: 68 (dł) x24 (wys) x10,5 (szer)

- Robot PIAP GRYF może współpracować z urządzeniem rentgenowskim składającym się z generatora promieniowania oraz ekranu. Urządzenie rentgenowskie musi być zainstalowane
w uchwycie - Uchwyt urządzenia rentgenowskiego składa się z:
– uchwytu do zaciskania w chwytaku
– wysięgnika teleskopowego
– uchwytu ekranu
– uchwytu generatora promieniowania




- umożliwia sterowanie robotem przy braku łączności radiowej
- niezbędna do podłączenia repeater’a
- ręczna nawijarka światłowodowa składa się z:
– Korpusu
– Korby
– Przewodu światłowodowego krótkiego
– Przewodu światłowodowego długiego (nawiniętego na bębnie)
– Uchwytów mocujących do szyny RIS - waga [kg]: 3,1
- wymiary [cm]: 21(dł) x 25(szer) x 28(wys)
- parametry techniczne światłowodu:
– Minimalny promień gięcia 25mm;
– Maksymalna siła rozciągająca 300N (30,5 kg).
– dostępne długości [m]: 150, 300

- umożliwia sterowanie robotem przy braku łączności radiowej
- długość przewodu: do 300m
- waga [kg]:6,15
- wymiary [cm]: 28(dł) x23(szer) x24(wys)

- do zdalnego odpalania ładunków wybuchowych

- Robot PIAP GRYF posiada dwukierunkową łączność audio pomiędzy robotem i konsolą sterowania. Domyślnie aktywny jest kanał audio przesyłający dźwięk z mikrofonów robota do głośnika umieszczonego w konsoli sterowania. Aktywacja kanału przesyłającego dźwięk z mikrofonu konsoli sterowania do głośnika robota wymaga przyciśnięcia i przytrzymania przycisku PTT (Push To Talk).

- mały panel sterujący, umożliwiający kierowanie robotem
- wewnętrzny akumulator (ładowarka 230v)
- waga[kg]:0,43
- wymiary [cm]: 16,5(dł)x11(szer)x3,5 [+3,5 joysticki](wys)
- zasięg [m]: 10 (w przestrzeni otwartej)
- czas pracy: szacowany na min 1 godz

-
- Zapasowy akumulator do stanowiska operatorskiego

-
-
- Umożliwia ciągłą pracę stanowiska operatorskiego podczas podłączenia do źródła prądu
-

-
-
- 2 krotnie zwiększa zdolności operacyjne robota
- pozwala zwiększyć zasięg komunikacji radiowej podczas sterowania z pojazdów lub pomieszczeń
-

-
-
- wybijak pracuje automatycznie i nie wymaga
dodatkowych czynności obsługowych. - wybijak składa się z:
– grota zakończonego węglikiem spiekanym i układu
młotka wewnętrznego. Obejma umożliwia uchwycenie wybijaka przez
szczęki chwytaka
- wybijak pracuje automatycznie i nie wymaga
-

-
-
-
- metalowy koszyk transportowy ułatwiający bezpieczny przewóz ciężkiego ładunku
-
-

-
-
-
-
-
-
- Wymazówka środowiskowa
- Próbnik podłoża
- Zestaw próbników kryminalistycznych
- Adsorber SPME
- R-Sensor (zintegrowany EKO-C)
-
-
-
-
-

-
- Wybijanie szyb, dziur w powierzchniach, opraw zamkowych i innych małych elementów (zasada „kafara”)
- Przebijanie przedmiotów np. opony
- Rozbijanie zawiasów
- Przecinanie metalowych prętów, kabli, drutów, łańcuchów, rurek
- Odcinanie elementów
- Inicjowanie lontów nieelektrycznych systemów detonacji jak STS, NDS, NONEL
- Podstawowe końcówki robocze:
– Nożyce do cięcia kabli, drutów i prętów;
– Wybijaki do szyb oraz innych elementów;
– Przebijaki;
– Wyzwalacze do inicjowania wybuchu za pomocą nieelektrycznych systemów detonacji;
– Noże (ostrza) odcinające;
– możliwość zaprojektowania końcówek na konkretne zapotrzebowanie użytkownika

-
- do identyfikacji błędów i usterek robota
- do zmian ustawień i konfiguracji robota
- złącze akcesoriów i SVGA

>
-
- umożliwia widzenie w nocy
- mocowana przy kamerze chwytakowej
- zasilanie z robota
- funkcja zdalnego wyłączania przy przełączaniu widoku kamery
- wymiary [cm]: 20(dł) x 9 (wys) x ?(szer)
Deklarujemy gotowość modyfikacji robota oraz wyposażenia opcjonalnego zgodnie z potrzebami użytkownika.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}