- Wyposażenie:
- kamera z oświetlaczami IR do użytku w dzień i w nocy
- lasery (2szt)
- włącznik bezpieczeństwa
- waga [kg]: 2,1
- wymiary [cm]: 12-20 (szer) x14 (wys) x 11(dł)
 umożliwia zamontowanie strzelby typu Benelli M4 Super 90
umożliwia zamontowanie strzelby typu Benelli M4 Super 90- wyposażony w celownik laserowy, złącze akcesoriów i włącznik bezpieczeństwa
- materiały: stal + aluminium
- waga [ kg]: 3
- wymiary [cm]: 68 (dł) x24 (wys) x10,5 (szer)
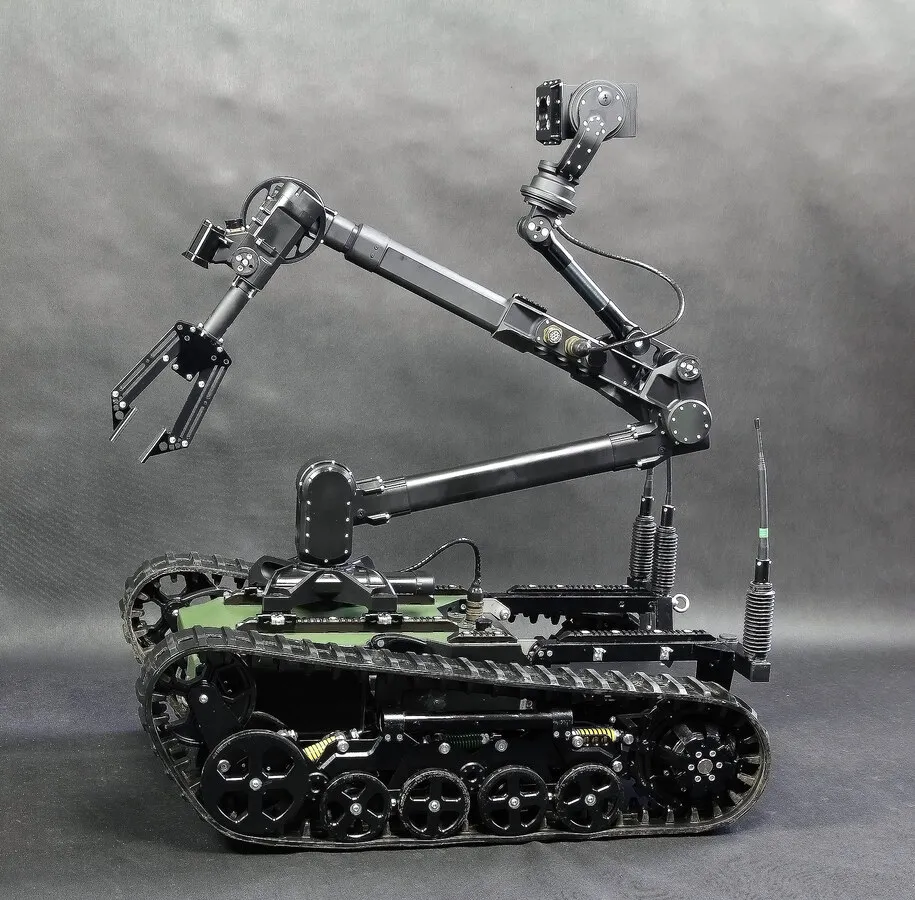
 Robot PATROL może współpracować z urządzeniem rentgenowskim składającym się z generatora promieniowania oraz ekranu. Urządzenie rentgenowskie musi być zainstalowane w uchwycie
Robot PATROL może współpracować z urządzeniem rentgenowskim składającym się z generatora promieniowania oraz ekranu. Urządzenie rentgenowskie musi być zainstalowane w uchwycie- Uchwyt urządzenia rentgenowskiego składa się z:
– uchwytu do zaciskania w chwytaku
– wysięgnika teleskopowego
– uchwytu ekranu
– uchwytu generatora promieniowania




 umożliwia sterowanie robotem przy braku łączności radiowej
umożliwia sterowanie robotem przy braku łączności radiowej- długość przewodu: do 300m
- waga [kg]:6,15
- wymiary [cm]: 28(dł) x23(szer) x24(wys)

 do zdalnego odpalania ładunków wybuchowych
do zdalnego odpalania ładunków wybuchowych
 pozwala zwiększyć zasięg komunikacji radiowej podczas sterowania z pojazdów lub pomieszczeń
pozwala zwiększyć zasięg komunikacji radiowej podczas sterowania z pojazdów lub pomieszczeń
 Zapasowy akumulator do bazy mobilnej
Zapasowy akumulator do bazy mobilnej
 Zapasowy akumulator do stanowiska operatorskiego
Zapasowy akumulator do stanowiska operatorskiego
 Umożliwia ciągłą pracę stanowiska operatorskiego podczas podłączenia do źródła prądu
Umożliwia ciągłą pracę stanowiska operatorskiego podczas podłączenia do źródła prądu
 wybijak pracuje automatycznie i nie wymaga
wybijak pracuje automatycznie i nie wymaga
dodatkowych czynności obsługowych.- wybijak składa się z:
- grota zakończonego węglikiem spiekanym i układu
młotka wewnętrznego. Obejma umożliwia uchwycenie wybijaka przez
szczęki chwytaka
- grota zakończonego węglikiem spiekanym i układu

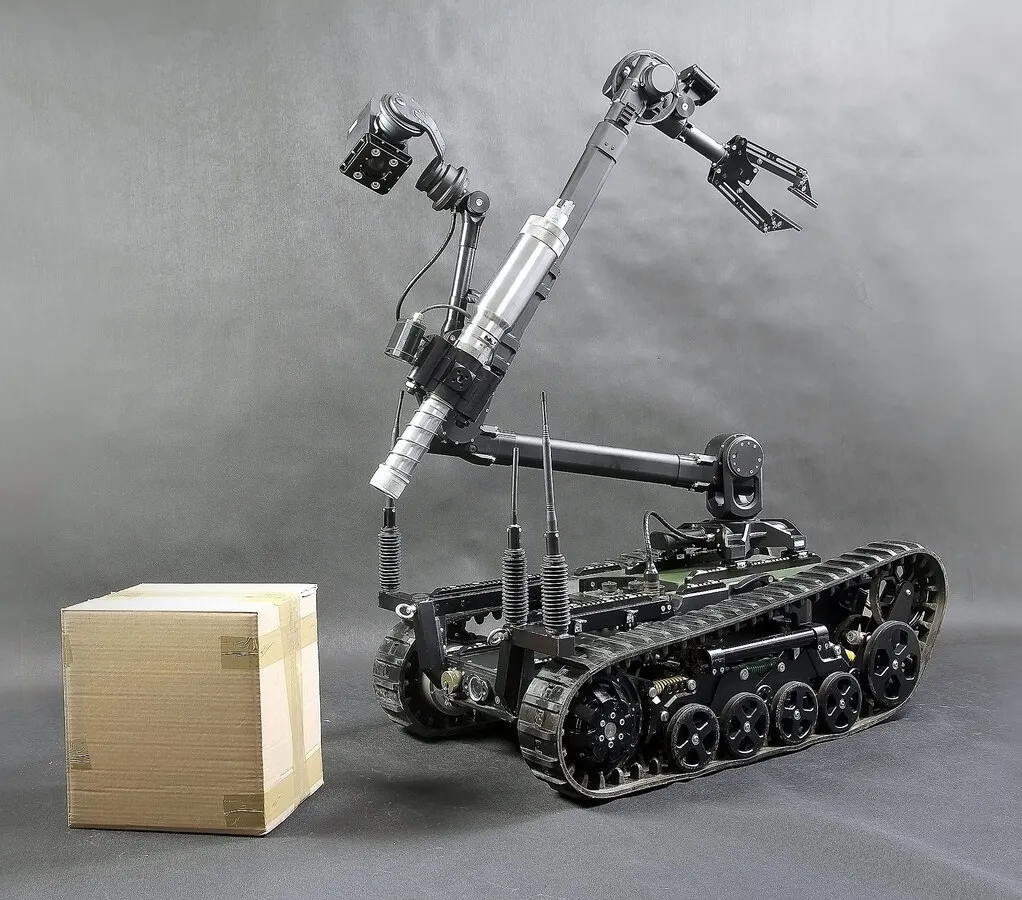
- metalowy koszyk transportowy ułatwiający bezpieczny przewóz ciężkiego ładunku
 Wymazówka środowiskowa
Wymazówka środowiskowa- Próbnik podłoża
- Zestaw próbników kryminalistycznych
- Adsorber SPME
- R-Sensor (zintegrowany EKO-C)

 Wybijanie szyb, dziur w powierzchniach, opraw zamkowych i innych małych elementów (zasada „kafara”)
Wybijanie szyb, dziur w powierzchniach, opraw zamkowych i innych małych elementów (zasada „kafara”)- Przebijanie przedmiotów np. opony
- Rozbijanie zawiasów
- Przecinanie metalowych prętów, kabli, drutów, łańcuchów, rurek
- Odcinanie elementów
- Inicjowanie lontów nieelektrycznych systemów detonacji jak STS, NDS, NONEL
- Podstawowe końcówki robocze:
- Nożyce do cięcia kabli, drutów i prętów;
- Wybijaki do szyb oraz innych elementów;
- Przebijaki;
- Wyzwalacze do inicjowania wybuchu za pomocą nieelektrycznych systemów detonacji;
- Noże (ostrza) odcinające;
- Możliwość zaprojektowania końcówek na konkretne zapotrzebowanie użytkownika.